9.3: Virtuaalityö
olemme nähneet, että konservatiivisten voimien alainen mekaaninen systeemi on tasapainossa, kun potentiaalienergian derivaatat koordinaattien suhteen ovat nolla. Menetelmä tällaisten ongelmien ratkaisemiseksi on siis kirjoittaa potentiaalienergialle lauseke ja laittaa derivaatat nollaksi.
hyvin samankaltainen menetelmä on käyttää virtuaalityön periaatetta. Tässä menetelmässä kuvittelemme, että toimimme systeemissä siten, että yksi koordinaateista kasvaa. Kuvittelemme esimerkiksi, mitä tapahtuisi, jos venyttäisimme jousta tai kasvattaisimme kahden nivelen välistä kulmaa tai sitä kulmaa, jonka tikkaat tekevät nojatessaan seinää vasten. Kysymme itseltämme, kuinka paljon meidän on tehtävä työtä järjestelmän eteen, jotta tätä koordinointia voidaan lisätä hieman. Jos systeemi lähtee tasapainotilasta, tämä työ on hyvin pieni, ja äärettömän pienen siirtymän rajalla tämä ”virtuaalinen työ” on nolla. Tämä menetelmä eroaa hyvin vähän potentiaalienergian derivaatan asettamisesta nollaan. Mainitsen sen tässä kuitenkin, koska käsite voisi olla hyödyllinen luvussa 13 kuvailtaessa Hamilton ’ s variational periaate.
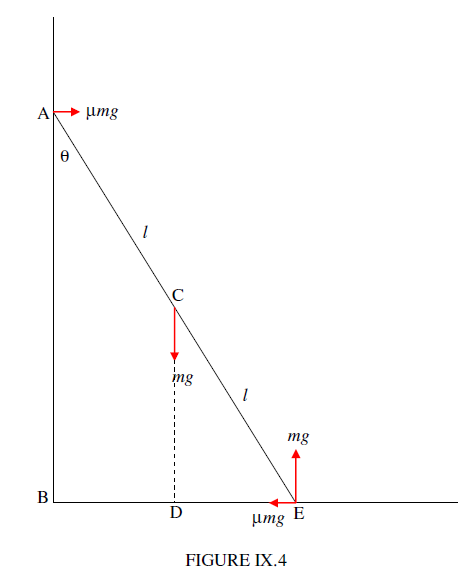
aloitetaan tekemällä yksinkertainen tikapuuongelma virtuaalityön menetelmällä. Tavallinen yhtenäinen tikkaat lukion fysiikan, pituus \ (2L\) ja paino \( mg\), kallistuu rajoittamalla staattinen tasapaino vastaan tavallista sileä pystysuora seinä ja karkea vaakasuora lattia, jonka kerroin rajoittaa staattinen kitka on \( \mu\). Mikä on kulma \(\theta \), että tikkaat tekee pystysuora seinä?
tähän on useita tapoja, jotka tulevat monelle lukijalle tutuiksi. Ainoa pieni muistutus, jonka annan, on huomauttaa, että jos haluatte yhdistää tikapuiden juurella olevat kaksi voimaa yhdeksi voimaksi, joka toimii ylöspäin ja hieman vasemmalle, niin että silloin on vain kolme voimaa, jotka vaikuttavat tikkaisiin, näiden kolmen voiman on toimittava yhden pisteen kautta, joka on tikkaiden keskikohdan yläpuolella ja seinän kosketuspisteen oikealla puolella. Mutta olemme nyt kiinnostuneita ratkaisemaan tämän ongelman virtuaalityön periaatteella.
ennen kuin aloitan, varoitan, että virtuaalityön periaatetta käytettäessä on tärkeää olla pikkutarkka merkkien suhteen, ja muistutan tässä suhteessa lukijoita siitä, että differentiaalilaskennassa symbolit \( \delta\) ja \( d\) skalaarisuureen \( x\) edessä eivät tarkoita ”pientä muutosta” tai ”äärettömän pientä muutosta \( x\). Tällainen kielenkäyttö on epämääräistä. Symbolit tulevat sanoista ” a small increase in ”ja”An infinitesimal increase in”.
:
\
ja
\
\
ja
\
\
\
\
\
edelleen, jos voiman tehtävä C: ssä olisi \ (mg\) kertaa etäisyyden CD pieneneminen ja kitkavoiman tekemä työ E: ssä olisi miinus \( \mu mg\) kertaa etäisyyden kasvu on. Kaksi muuta voimaa eivät tee mitään. Niinpä ulkoisten voimien tikapuilla tekemä” virtuaalityö ” on
\
laskettaessa lauseke virtuaalityölle nollaan, saadaan
\
kannattaa tarkistaa, että tämä on sama vastaus kuin muillakin menetelmillä – helpointa lienee ottaa hetkiä E: stä.
virtuaalityössä on jotain, joka tuo mieleen termodynamiikan. Termodynamiikan ensimmäinen laki on esimerkiksi \ (\Delta U = \Delta q + \Delta w\), jossa \( \Delta U\) on systeemin sisäenergian lisäys, \ (\Delta q\) on systeemiin lisätty lämpö ja \( \Delta w\) on systeemille tehty työ. Prepositioilla on tärkeä osa termodynamiikassa. On aina ilmoitettava selkeästi ja yksiselitteisesti, tekeekö työn mäntä kaasulla vai järjestelmässä olevalla kaasulla, vai saadaanko järjestelmästä lämpöä vai menetetäänkö se. Ilman näitä prepositioita kaikki keskustelu on merkityksetöntä. Samoin ratkaistaessa ongelmaa virtuaalityön periaatteella on aina oleellista sanoa, kuvaatko voiman tekemää työtä missä järjestelmän osassa (tikapuilla vai lattialla?) ja kuvaatko jonkin pituuden tai kulman kasvua vai laskua.
siirrytään nyt hieman vaikeampaan ongelmaan, jota kokeillaan kolmella eri keinolla – myös virtuaalityöllä.
Kuvassa IX.5 yhtenäinen tanko AB, jonka paino \( Mg\) ja pituus \( 2a\), on vapaasti saranoitu A: ssa. Valon päättymättömän jonon pituus \( l\) on toinen pää kiinnitetty kiinteään pisteeseen C samalla tasolla kuin A ja kaukana \( 2a\) siitä. Se kulkee renkaan läpi ja kantaa toisessa päässä vapaasti roikkuvaa painoa \( \frac{1}{10}Mg\). (”Sileä” rengas tarkoittaa, että jänteen jännitys on sama renkaan molemmilla puolilla.) Etsi kulma ohjaamo, kun järjestelmä on tasapainossa.
olen merkinnyt eri kulmilla ja pituuksilla, mikä voidaan helposti päätellä systeemin geometriasta, ja olen merkinnyt myös tangon neljä voimaa.
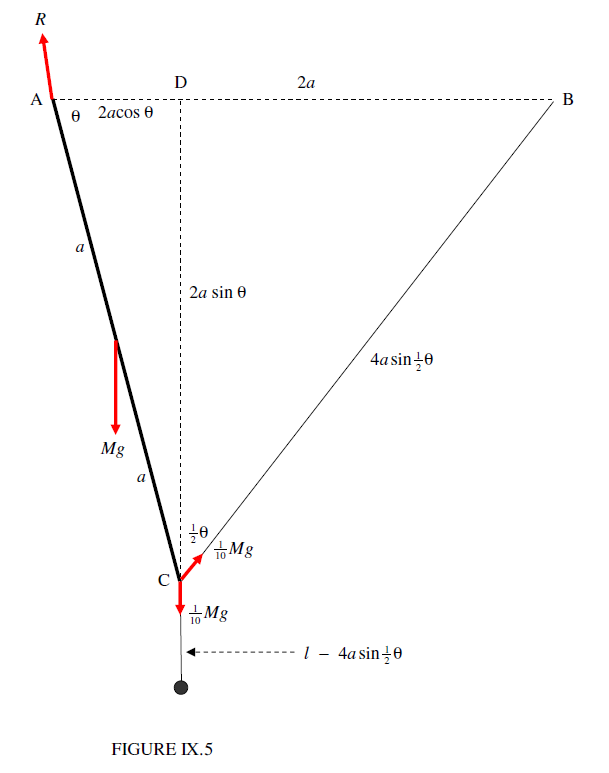
kokeillaan ensin hyvin tavanomaista menetelmää. Tiedämme melko vähän tangon saranan voimasta R (tosin KS.alla), ja siksi tämä on hyvä syy ottaa momentteja pisteen A suhteen. saamme heti
\
nyt kokeillaan samaa ongelmaa energiaolosuhteiden avulla. Otamme potentiaalienergian nollan, kun sauva on vaakasuorassa – jolloin pieni massa on etäisyydellä l tason AC alapuolella.
\=-\frac{2}{3}mga(3\sin\theta-\sin\frac{1}{2}\theta)\]
derivaatta on
\
kokeillaan sitä nyt virtuaalityöllä. Aiomme lisätä \ (\theta\) by \( \delta\theta\) ja katsoa, kuinka paljon työtä on tehty.
näin virtuaalityö on
\
Jos asetamme tämän nollaksi, saamme saman tuloksen kuin ennen.
tekijä
Jeremy Tatum (Victorian yliopisto, Kanada)