9.3: virtuellt arbete
Vi har sett att ett mekaniskt system som är föremål för konservativa krafter är i jämvikt när derivaten av den potentiella energin med avseende på koordinaterna är noll. En metod för att lösa sådana problem är därför att skriva ner ett uttryck för den potentiella energin och sätta derivaten lika med noll.
en mycket liknande metod är att använda principen om virtuellt arbete. I denna metod föreställer vi oss att vi agerar på systemet på ett sådant sätt att vi ökar en av koordinaterna. Vi föreställer oss till exempel vad som skulle hända om vi skulle sträcka en av fjädrarna eller öka vinkeln mellan två ledade stavar eller vinkeln som stegen gör när den lutar mot väggen. Vi frågar oss hur mycket arbete vi måste göra på systemet för att öka denna koordinat med en liten mängd. Om systemet börjar från jämvikt kommer detta arbete att vara mycket litet, och i gränsen för en oändligt liten förskjutning kommer detta ”virtuella arbete” att vara noll. Denna metod skiljer sig väldigt lite från att ställa in derivatet av den potentiella energin till noll. Jag nämner det här, i alla fall, eftersom konceptet kan vara användbart i kapitel 13 för att beskriva Hamiltons variationsprincip.
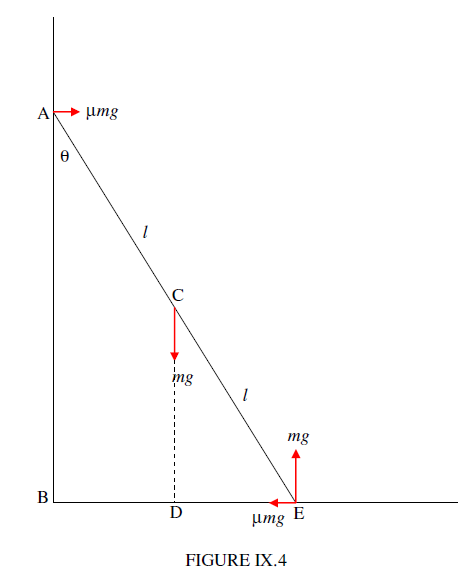
låt oss börja med att göra ett enkelt stegproblem med metoden för virtuellt arbete. Den vanliga enhetliga stegen i gymnasiet fysik, längd \ (2L\) och vikt \ (mg\), lutar i att begränsa statisk jämvikt mot den vanliga släta vertikala väggen och det grova horisontella golvet vars koefficient för att begränsa statisk friktion är \ (\mu\). Vad är vinkeln \(\theta\) som stegen gör med den vertikala väggen?
det finns flera sätt att göra detta, vilket kommer att vara bekant för många läsare. Den enda lilla påminnelsen som jag kommer att ge är att påpeka att om du vill kombinera de två krafterna vid foten av stegen till en enda kraft som verkar uppåt och något till vänster, så att det då bara finns tre krafter som verkar på stegen, måste de tre krafterna agera genom en enda punkt, som kommer att ligga ovanför mitten av stegen och till höger om kontaktpunkten med väggen. Men vi är nu intresserade av att lösa detta problem med principen om virtuellt arbete.
innan jag börjar, bör jag varna att det är viktigt att använda principen om virtuellt arbete för att vara noggrant försiktig med tecken, och i det avseendet påminner jag läsarna om att i differentialkalkylen betyder symbolerna \( \delta\) och \( d\) framför en skalär kvantitet \( x\) inte ”en liten förändring i” eller ”en oändlig förändring” i \( x\). Ett sådant språk är vagt. Symbolerna står för” en liten ökning av ”och”en oändlig ökning av”.
låt oss notera följande avstånd:
\
och
\
\
och
\
vidare, om skulle öka \( \Theta\) med \( \delta\theta\), skulle arbetet som utförs av kraften vid C vara \( mg\) gånger minskningen av avståndet CD, och arbetet som utförs av friktionskraften vid E skulle vara minus \( \mu mg\) gånger ökning av avståndet vara. De andra två krafterna gör inget arbete. Således är det” virtuella arbetet ” som utförs av de yttre krafterna på stegen
\
på att sätta uttrycket för det virtuella arbetet till noll, får vi
\
Du bör verifiera att detta är samma svar som du får från andra metoder – det enklaste är förmodligen att ta stunder om E.
det finns något om virtuellt arbete som påminner mig om termodynamik. Den första lagen om termodynamik är till exempel \( \Delta U=\Delta q+\Delta w\), där \( \Delta U\) är ökningen av systemets inre energi, \( \Delta q\) är värmen som läggs till systemet, och \( \Delta w\) är det arbete som utförs på systemet. Prepositioner spelar en viktig roll i termodynamiken. Det är alltid obligatoriskt att tydligt och utan tvetydighet ange om arbetet utförs av kolven på gasen eller av gasen på systemet; eller om värme uppnås av systemet eller förloras från det. Utan dessa prepositioner är all diskussion meningslös. På samma sätt för att lösa ett problem med principen om virtuellt arbete är det alltid viktigt att säga om du beskriver det arbete som utförs av en kraft på vilken del av systemet (på stegen eller på golvet?) och om du beskriver en ökning eller en minskning av viss längd eller vinkel.
Låt oss nu flytta till ett lite svårare problem, som vi ska försöka med tre olika metoder – inklusive det virtuella arbetet.
i Figur IX. 5 är en enhetlig stång AB med vikt \( Mg\) och längd \( 2a\) fritt gångjärn vid A. änden B bär en slät ring av försumbar massa. En lätt osträckbar sträng av Längd \ (l\) har en ände fäst vid en fast punkt C på samma nivå som A och avlägsen \( 2a\) från den. Den passerar genom ringen och bär i sin andra ände en vikt\ (\frac{1}{10}Mg\) hängande fritt. (Den” släta ” ringen betyder att spänningen i strängen är densamma på båda sidor av ringen.) Hitta vinkelhytten när systemet är i jämvikt.
Jag har markerat i olika vinklar och längder, som lätt kan bestämmas utifrån systemets geometri, och jag har också markerat de fyra krafterna på stången.
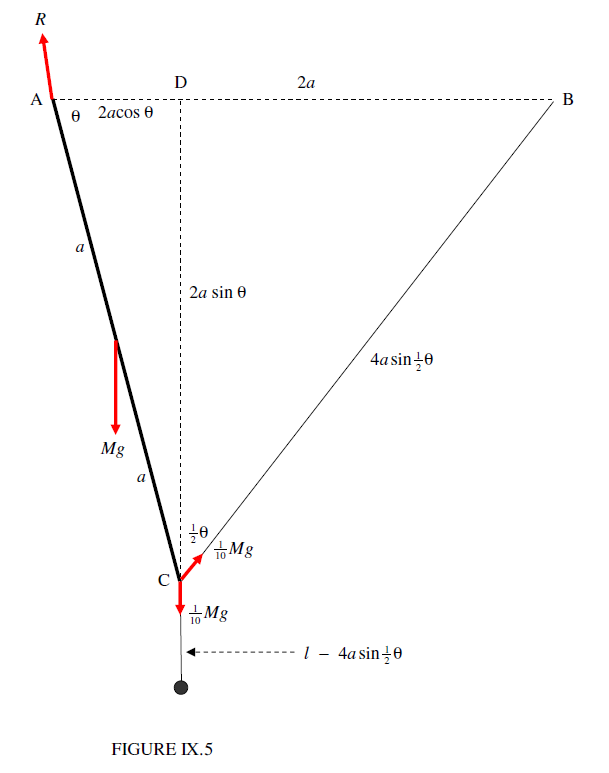
låt oss först prova en mycket konventionell metod. Vi vet ganska lite om kraften R av gångjärnet på stången (men se nedan), och därför är det en bra anledning att ta ögonblick om punkten A. Vi får omedelbart
\
nu ska vi försöka samma problem med energiförhållanden. Vi tar noll av potentiell energi när stången är horisontell-vid vilken tidpunkt den lilla massan ligger på ett avstånd l under nivån AC.
\= – \ frac{2}{3}Mga (3\sin \ theta – \sin \ frac{1}{2}\theta)\]
derivatet är
\
låt oss nu prova det med virtuellt arbete. Vi kommer att öka \ (\theta\) med \(\delta\ theta\) och se hur mycket arbete som görs.
således är det virtuella arbetet
\
om vi sätter detta lika med noll får vi samma resultat som tidigare.
bidragsgivare
-
Jeremy Tatum (University of Victoria, Kanada)