Sensor Fusion
Kalman szűrők
Az adatok egyesítéséhez használt algoritmust Kalman szűrőnek nevezzük.
a Kalman szűrő az adatfúzió egyik legnépszerűbb algoritmusa. Rudolph Kalman 1960-ban találta fel, ma már telefonjainkban vagy műholdainkban használják navigációra és követésre. A szűrő leghíresebb használata az Apollo 11 küldetése során volt, hogy a legénységet visszaküldje a Holdra.
mikor kell Kálmán szűrőt használni ?
a Kalman-szűrő használható az adatok egyesítéséhez, hogy megbecsüljük egy dinamikus rendszer állapotát (idővel fejlődik) a jelenben (szűrés), a múltban (simítás) vagy a jövőben (előrejelzés). Az autonóm járművekbe ágyazott érzékelők néha hiányosak és zajosak. Az érzékelők pontatlansága (zaj) nagyon fontos probléma, amelyet a Kalman szűrők kezelnek.
egy Kalman szűrőt használunk egy rendszer állapotának becslésére, amelyet x jelöl. ez a vektor egy P pozícióból és egy v sebességből áll.

minden becslésnél a P.
bizonytalanság mértékét társítjuk. A radar meg tudja becsülni, hogy egy gyalogos 10 méterre van, míg a Lidar 12 méterre becsüli. A Kalman szűrők használata lehetővé teszi, hogy pontos képet kapjon arról, hogy hány méter valóban a gyalogos a két érzékelő zajának kiküszöbölésével.
a Kálmán-szűrő becsléseket hozhat létre a körülötte lévő objektumok állapotáról. A becsléshez csak a jelenlegi megfigyelésekre és az előző előrejelzésre van szükség. A mérési előzmények nem szükségesek. Ez az eszköz ezért könnyű és idővel javul.
hogyan néz ki
az állapotot és a bizonytalanságot Gauss-ok képviselik.

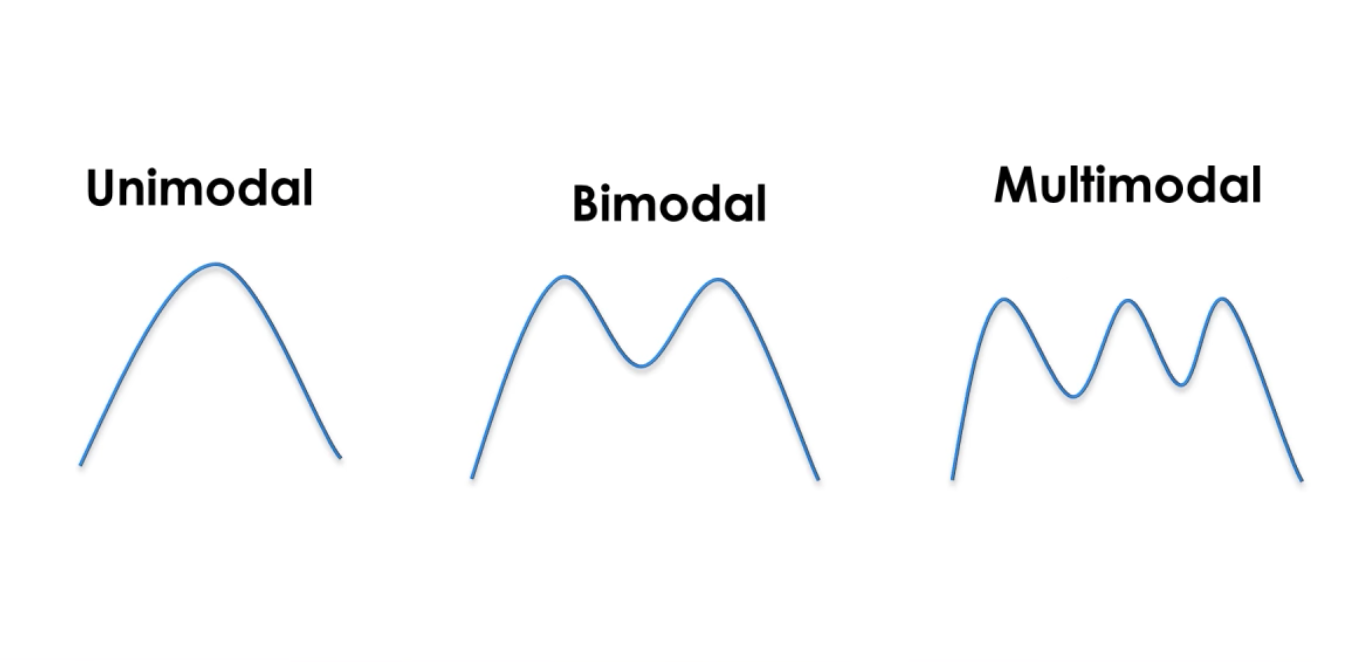
a Gauss egy folyamatos függvény, amely alatt a terület 1. Ez lehetővé teszi számunkra a valószínűségek ábrázolását. A normális eloszlás valószínűségén vagyunk. A Kálmán-szűrők uni-modalitása azt jelenti, hogy minden alkalommal egyetlen csúcsunk van a rendszer állapotának becsléséhez.
van egy állapotokat képviselő átlagunk, és egy bizonytalanságot képviselő varianciánk, a 2. Minél nagyobb a variancia, annál nagyobb a bizonytalanság.

Gaussians make it possible to estimate probabilities around the state and the uncertainty of a system. A Kalman filter is a continuous and uni-modal function.
Bayesian Filtering
In general, a Kalman filter is an implementation of a Bayesian filter, ie a sequence of alternations between prediction and update or correction.

Prediction: We use the estimated state to predict the current state and uncertainty.
Update: Érzékelőink megfigyeléseit arra használjuk, hogy korrigáljuk az előrejelzett állapotot, és pontosabb becslést kapjunk.
a becsléshez a Kálmán-szűrőnek csak az aktuális megfigyelésekre és az előző előrejelzésre van szüksége. A mérési előzmények nem szükségesek.
matematika
a Kálmán szűrők mögött álló matematika mátrixok összeadásából és szorzásából áll. Két szakaszunk van: előrejelzés és frissítés.
predikció
előrejelzésünk abból áll, hogy megbecsülünk egy X’ állapotot és egy P’ bizonytalanságot t időben az előző X és P állapotokból t-1 időpontban.

- F: átmeneti mátrix a T-1-től t-ig
- 6: hozzáadott zaj
- Q: Kovariancia mátrix, beleértve a zajt
frissítés
a frissítési fázis egy érzékelő z méréséből áll, hogy korrigáljuk az előrejelzésünket, és így megjósoljuk az x-et és a P-t.

képletek frissítése
- y: különbség a tényleges mérés és az előrejelzés között, azaz a hiba.
- S: becsült rendszerhiba
- H: az érzékelő markere és a miénk közötti átmenet mátrixa.
- R: Az érzékelő zajához kapcsolódó kovariancia mátrix (az érzékelő gyártója adja meg).
- K: Kálmán gain. A 0 és 1 közötti együttható tükrözi az előrejelzésünk korrekciójának szükségességét.
a frissítési fázis lehetővé teszi egy x és egy P becslését közelebb a valósághoz, mint amit a mérések nyújtanak.
a Kálmán-szűrő valós időben, előzetes adatok nélkül teszi lehetővé a jóslatokat. A mátrixok szorzásán alapuló matematikai modellt használunk minden alkalommal, amikor meghatározzuk az X állapotot (pozíció, sebesség) és a P bizonytalanságot.
representation prior/Posterior
Ez az ábra azt mutatja, hogy mi történik a Kálmán-szűrőben.

- az előrejelzett állapotbecslés az első becslésünket, az előrejelzési fázisunkat jelenti. A prior-ról beszélünk.
- a mérés az egyik érzékelőnk által végzett mérés. Jobb a bizonytalanság, de az érzékelők zaja olyan mérést tesz lehetővé, amelyet mindig nehéz megbecsülni. A valószínűségről beszélünk.
- az optimális Állapotbecslés a frissítési fázisunk. A bizonytalanság ezúttal a leggyengébb, információkat halmoztunk fel, és lehetővé tettük, hogy biztosabb értéket hozzunk létre, mint csak az érzékelőnkkel. Ez az érték a legjobb tippünk. Posterior-ról beszélünk.
amit a Kalman szűrő valósít meg, az valójában Bayes-szabály.

egy Kálmán-szűrőben a mérésekből származó előrejelzéseket hurkoljuk. Előrejelzéseink mindig pontosabbak, mivel bizonyos mértékű bizonytalanságot tartunk fenn, és rendszeresen kiszámoljuk a jóslatunk és a valóság közötti hibát. Mátrixszorzásokból és valószínűségi képletekből képesek vagyunk megbecsülni a körülöttünk lévő járművek sebességét és helyzetét.
“Extended/Unscented” szűrők és nemlinearitás
alapvető probléma merül fel. Matematikai képleteink mind y = ax + b típusú lineáris függvényekkel vannak megvalósítva.
a Kalman szűrő mindig lineáris függvényekkel működik. Másrészt, ha radart használunk, az adatok nem lineárisak.

a radar három méréssel látja a világot:
Ez a három érték teszi mérésünket nemlineárisvá, figyelembe véve a szöget is.
itt az a célunk, hogy az adatokat konvertáljuk a (Z) adatokból (px, py, vx, vy).
Ha nemlineáris adatokat adunk meg egy Kálmán-szűrőben, akkor az eredményünk már nem uni-modális Gauss formában van, és már nem tudjuk megbecsülni a pozíciót és a sebességet.

auss vs non-linearitás
tehát közelítéseket használunk, ezért két módszeren dolgozunk:
– a kiterjesztett Kalman szűrők jacobian és Taylor sorozatokat használnak a modell linearizálásához.
– illat nélküli Kalman szűrők pontosabb közelítést használnak a modell linearizálásához.
a nem linearitás Radar általi beépítésének kezelésére léteznek technikák, amelyek lehetővé teszik szűrőink számára a követni kívánt objektumok helyzetének és sebességének becslését.