9.3: Virtuální Práce
Jsme viděli, že mechanický systém podléhá konzervativních sil je v rovnováze, když je derivace potenciální energie s ohledem na souřadnice jsou nulové. Metodou řešení těchto problémů je proto zapsat výraz pro potenciální energii a deriváty se rovnat nule.
velmi podobnou metodou je použití principu virtuální práce. V této metodě si představujeme, že jednáme podle systému tak, abychom zvětšili jednu ze souřadnic. Jsme představte si například, co by se stalo, kdyby jsme byli protáhnout jeden z pramenů, nebo ke zvýšení úhlu mezi dvěma spojované tyče, nebo úhlu, že žebřík dělá, jak se to naklání proti zdi. Ptáme se sami sebe, kolik práce musíme na systému udělat, abychom tuto souřadnici zvýšili o malé množství. Pokud systém vychází z rovnováhy, bude tato práce velmi malá a v limitu nekonečně malého posunu bude tato „virtuální práce“ nulová. Tato metoda se velmi málo liší od nastavení derivátu potenciální energie na nulu. Zmiňuji to zde, nicméně, protože tento koncept by mohl být užitečný v kapitole 13 při popisu Hamiltonova variačního principu.
začněme jednoduchým žebříkovým problémem metodou virtuální práce. Obvyklé uniformě žebřík vysoké školy fyziky, délky \( 2l\) a hmotnosti \( mg\), je šikmá v omezení statické rovnováhy proti obvyklé hladké svislé stěně a drsné vodorovné podlaze, jejíž koeficient omezení statické tření je \( \mu\). Jaký je úhel \(\theta \), který žebřík vytváří se svislou stěnou?
existuje několik způsobů, jak toho dosáhnout, což bude známo mnoha čtenářům. Jediné malé připomenutí, které jsem dá se poukázat na to, že pokud budete chtít kombinovat dvě síly u paty žebříku do jediné síly, která působí směrem nahoru a trochu doleva, takže tam jsou pak jen tři síly působící na žebřík, tři síly musí jednat prostřednictvím jediného bodu, který se bude nad střední žebříku a vpravo od bodu kontaktu se stěnou. Nyní nás však zajímá řešení tohoto problému principem virtuální práce.
Před zahájením, že bych vás měl varovat, že to je důležité při použití principu virtuální práce se úzkostlivě opatrní, o znamení, a v tomto ohledu připomínám čtenářům, že v diferenciální počet symbolů \( \delta\) a \( d\) v přední části skalární veličina \( x\) neznamená „malá změna“ nebo „nepatrnou změnu“ v \( x\). Takový jazyk je vágní. Symboly znamenají „malý nárůst“ a „nekonečný nárůst“.
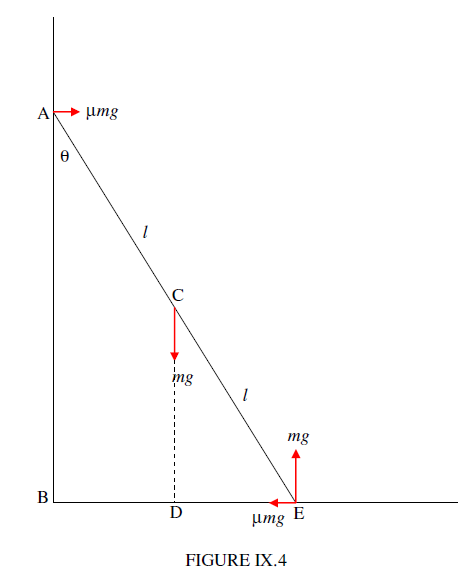
berme na vědomí následující vzdálenosti:
\
a
\
\
a
\
Dále, pokud se zvýší \( \theta\) podle \( \delta\theta\), práce silou na C by bylo \( mg\) – krát snížení vzdálenosti, CD, a práci třecí síly na to, E by bylo minus \( \mu mg\) krát zvýšení vzdálenosti. Ostatní dvě síly nefungují. Tedy „virtuální práce“ provádí vnější síly na žebříku je
\
Na uvedení výraz pro virtuální práce nulová, získáme
\
měli Byste ověřit, že je to stejná odpověď jako od ostatních metod – z nichž nejjednodušší je asi, aby se momenty, o. E.
Tam je něco o virtuální práci, která mi připomíná termodynamiky. První zákon termodynamiky, je například \( \Delta U=\Delta q+\Delta w\), kde \( \Delta U\) je zvýšení vnitřní energie systému, \( \Delta q\) je teplo přidané do systému, a \( \Delta w\), je práce konaná na systému. Předložky hrají důležitou roli v termodynamice. Vždy je povinné jasně a bez nejasností uvést, zda je práce prováděna pístem na plynu nebo plynem v systému; nebo zda je systém získáván nebo z něj ztracen. Bez těchto předložek je veškerá diskuse bezvýznamná. Stejně tak při řešení problému principem virtuální práce je vždy nezbytné říci, zda popisujete práci vykonanou silou na jaké části systému (na žebříku nebo na podlaze?) a zda popisujete zvětšení nebo zmenšení nějaké délky nebo úhlu.
přejděme nyní k poněkud obtížnějšímu problému, který zkusíme třemi různými metodami – včetně virtuální práce.
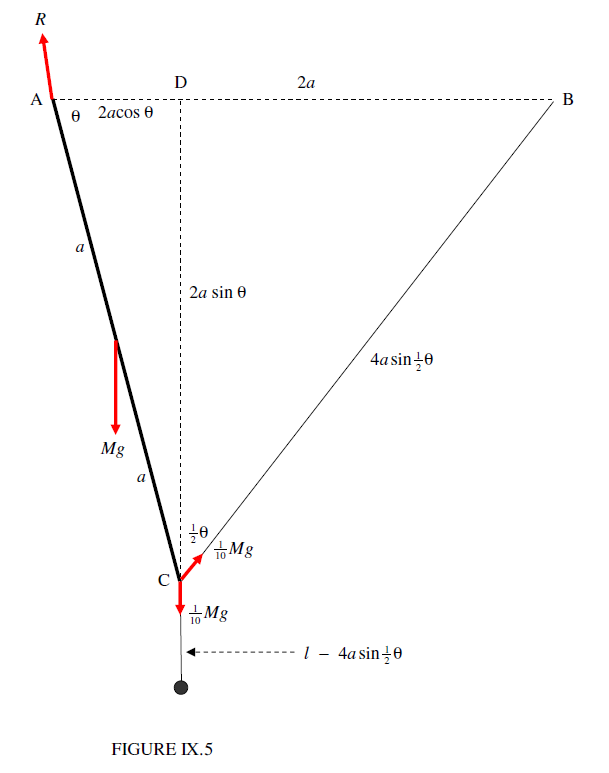
Na Obrázku IX.5, jednotné tyč AB o hmotnosti \( Mg\) a délce \( 2a\) je volně zavěšeny v. A. konec B nese hladký prsten z zanedbatelnou hmotnost. Lehký neroztažitelný řetězec délky \ (l\) má jeden konec připojený k pevnému bodu C na stejné úrovni jako A a vzdálený \( 2a\) od něj. Prochází prstencem a nese na svém druhém konci volně visící hmotnost \( \frac{1}{10}Mg\). („Hladký“ kroužek znamená, že napětí v řetězci je na obou stranách prstence stejné.) Najděte úhlovou kabinu, když je systém v rovnováze.
označil jsem v různých úhlech a délkách, které lze snadno určit z geometrie systému, a také jsem označil čtyři síly na tyči.
zkusme nejprve velmi konvenční metodu. Víme poměrně málo o platnost R. závěsu na tyči (i když viz níže), a proto je toto dobrý důvod pro pořizování chvíle o bodu A. Jsme okamžitě získat
\
Nyní zkusíme stejný problém pomocí energetické podmínky. Vezmeme nulu potenciální energie, když je tyč vodorovná – v té době je malá hmotnost ve vzdálenosti l pod úrovní AC.
\= – \ frac{2}{3}Mga (3 \ sin \ theta – \ sin \ frac{1}{2}\theta)\]
derivace je
\
nyní to zkusme virtuální prací. Zvýšíme \ (\theta\) o \ (\delta \ theta\) a uvidíme, kolik práce je vykonáno.
virtuální práce je tedy
\
pokud to dáme rovno nule, získáme stejný výsledek jako dříve.
Přispěvatel
-
Jeremy Tatum (University of Victoria, Kanada)