9.3: Virtuelle Arbeit
Wir haben gesehen, dass ein mechanisches System, das konservativen Kräften unterliegt, im Gleichgewicht ist, wenn die Ableitungen der potentiellen Energie in Bezug auf die Koordinaten Null sind. Eine Methode zur Lösung solcher Probleme besteht daher darin, einen Ausdruck für die potentielle Energie aufzuschreiben und die Ableitungen gleich Null zu setzen.
Eine sehr ähnliche Methode ist die Verwendung des Prinzips der virtuellen Arbeit. Bei dieser Methode stellen wir uns vor, dass wir auf das System so einwirken, dass eine der Koordinaten vergrößert wird. Wir stellen uns zum Beispiel vor, was passieren würde, wenn wir eine der Federn dehnen oder den Winkel zwischen zwei Gelenkstangen oder den Winkel, den die Leiter beim Anlehnen an die Wand einnimmt, vergrößern würden. Wir fragen uns, wie viel Arbeit wir am System leisten müssen, um diese Koordinate um einen kleinen Betrag zu erhöhen. Wenn das System vom Gleichgewicht ausgeht, wird diese Arbeit sehr klein sein, und in der Grenze einer infinitesimal kleinen Verschiebung wird diese „virtuelle Arbeit“ Null sein. Diese Methode unterscheidet sich kaum von der Einstellung der Ableitung der potentiellen Energie auf Null. Ich erwähne es hier jedoch, weil das Konzept in Kapitel 13 nützlich sein könnte, um Hamiltons Variationsprinzip zu beschreiben.
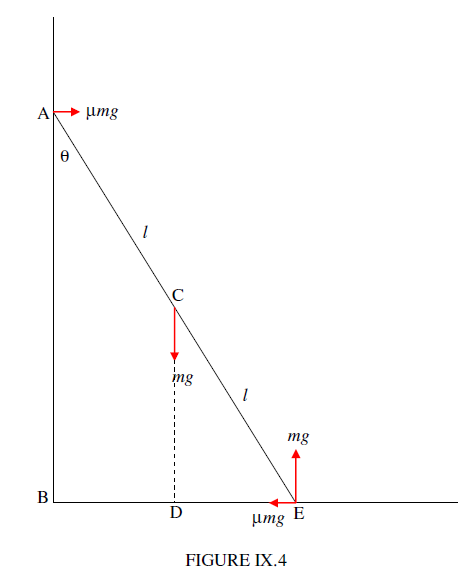
Beginnen wir mit einem einfachen Leiterproblem nach der Methode der virtuellen Arbeit. Die übliche einheitliche Leiter der Highschool-Physik, von Länge \ (2l \) und Gewicht \ ( mg \), lehnt sich zur Begrenzung des statischen Gleichgewichts gegen die übliche glatte vertikale Wand und den rauen horizontalen Boden, dessen Koeffizient zur Begrenzung der Haftreibung \ ( \ mu \) ist. Was ist der Winkel \ (\theta \), den die Leiter mit der vertikalen Wand macht?
Es gibt mehrere Möglichkeiten, dies zu tun, die vielen Lesern vertraut sein werden. Die einzige kleine Erinnerung, die ich geben werde, ist darauf hinzuweisen, dass, wenn Sie die beiden Kräfte am Fuß der Leiter zu einer einzigen Kraft kombinieren wollen, die nach oben und etwas nach links wirkt, so dass dann nur noch drei Kräfte auf die Leiter wirken, Die drei Kräfte müssen durch einen einzigen Punkt wirken, der sich über der Mitte der Leiter und rechts vom Berührungspunkt mit der Wand befindet. Aber wir sind jetzt daran interessiert, dieses Problem nach dem Prinzip der virtuellen Arbeit zu lösen.
Bevor ich beginne, sollte ich warnen, dass es bei der Anwendung des Prinzips der virtuellen Arbeit wichtig ist, sorgfältig auf Zeichen zu achten, und in dieser Hinsicht erinnere ich die Leser daran, dass in der Differentialrechnung die Symbole \( \delta\) und \( d\) vor einer skalaren Größe \( x \) bedeuten nicht „eine kleine Änderung in“ oder „eine infinitesimale Änderung“ in \( x \). Eine solche Sprache ist vage. Die Symbole stehen für „eine kleine Zunahme in“ und „eine infinitesimale Zunahme in“.
Beachten wir die folgenden Abstände:
\
und
\
\
und
\
Wenn man \( \theta\) um \( \delta\theta\) erhöhen würde, wäre die Arbeit, die von der Kraft bei C geleistet wird, \( mg \) mal die Abnahme des Abstands CD, und die Arbeit, die von der Reibungskraft bei E geleistet wird, wäre minus \( \mu mg\) mal die vergrößerung des Abstandes BE. Die anderen beiden Kräfte machen keine Arbeit. Somit ist die „virtuelle Arbeit“, die von den äußeren Kräften auf der Leiter geleistet wird,
\
Wenn wir den Ausdruck für die virtuelle Arbeit auf Null setzen, erhalten wir
\
Sie sollten überprüfen, ob dies die gleiche Antwort ist, die Sie von anderen Methoden erhalten – die einfachste davon ist wahrscheinlich, Momente über E zu nehmen.
Es gibt etwas an virtueller Arbeit, das mich an die Thermodynamik erinnert. Der erste Hauptsatz der Thermodynamik ist beispielsweise \ ( \ Delta U = \Delta q + \Delta w \), wobei \( \Delta U\) die Zunahme der inneren Energie des Systems ist, \ ( \Delta q \) ist die dem System hinzugefügte Wärme und \( \Delta w \) ist die am System geleistete Arbeit. Präpositionen spielen eine wichtige Rolle in der Thermodynamik. Es muss immer klar und eindeutig angegeben werden, ob der Kolben am Gas oder das Gas am System arbeitet oder ob das System Wärme gewinnt oder verliert. Ohne diese Präpositionen ist jede Diskussion bedeutungslos. Ebenso ist es bei der Lösung eines Problems nach dem Prinzip der virtuellen Arbeit immer wichtig zu sagen, ob Sie die Arbeit beschreiben, die von einer Kraft auf welchem Teil des Systems ausgeführt wird (auf der Leiter oder auf dem Boden?) und ob Sie eine Zunahme oder Abnahme einer Länge oder eines Winkels beschreiben. Lassen Sie uns nun zu einem etwas schwierigeren Problem übergehen, das wir mit drei verschiedenen Methoden ausprobieren werden – einschließlich der virtuellen Arbeit. In Abbildung IX.5 ist ein gleichmäßiger Stab AB von Gewicht \( Mg \) und Länge \( 2a\) frei an A angelenkt. Eine leichte, nicht dehnbare Schnur der Länge \( l\) hat ein Ende, das an einem festen Punkt C auf derselben Höhe wie A befestigt ist und \( 2a \) davon entfernt ist. Es geht durch den Ring und trägt an seinem anderen Ende ein frei hängendes Gewicht \( \frac{1}{10}Mg\). (Der „glatte“ Ring bedeutet, dass die Spannung in der Saite auf beiden Seiten des Rings gleich ist.) Finden Sie den Winkel CAB, wenn das System im Gleichgewicht ist.
Ich habe in verschiedenen Winkeln und Längen markiert, die leicht aus der Geometrie des Systems bestimmt werden können, und ich habe auch die vier Kräfte auf der Stange markiert.
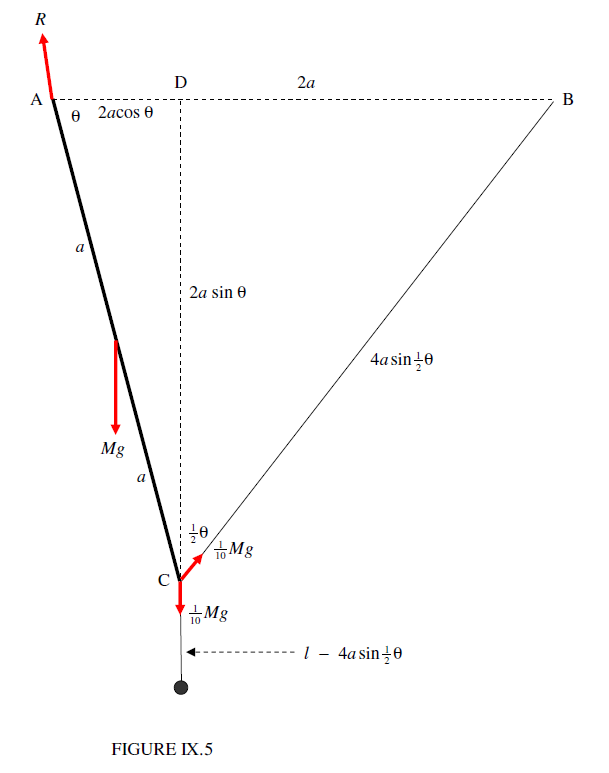
Versuchen wir zunächst eine sehr konventionelle Methode. Wir wissen ziemlich wenig über die Kraft R des Scharniers auf der Stange (obwohl siehe unten), und deshalb ist dies ein guter Grund, Momente über den Punkt A zu nehmen. Wir nehmen die Null der potentiellen Energie, wenn der Stab horizontal ist – zu diesem Zeitpunkt befindet sich die kleine Masse in einem Abstand l unter dem Niveau AC.
\=-\frac{2}{3}Mga(3\sin\theta-\sin\frac{1}{2}\theta)\]
Die Ableitung ist
\
Jetzt versuchen wir es mit virtueller Arbeit. Wir werden \( \theta\) um \( \delta\theta\) erhöhen und sehen, wie viel Arbeit geleistet wird.
Somit ist die virtuelle Arbeit
\
Wenn wir dies gleich Null setzen, erhalten wir das gleiche Ergebnis wie zuvor.
Mitwirkender
-
Jeremy Tatum (Universität von Victoria, Kanada)