9.3: virtuális munka
láttuk, hogy a konzervatív erőknek kitett mechanikai rendszer egyensúlyban van, amikor a potenciális energia származékai a koordinátákhoz képest nulla. Az ilyen problémák megoldásának egyik módja tehát az, hogy leírjuk a potenciális energia kifejezését, és a származékokat nullával egyenlővé tesszük.
nagyon hasonló módszer a virtuális munka elvének alkalmazása. Ebben a módszerben azt képzeljük el, hogy úgy cselekszünk a rendszeren, hogy növeljük az egyik koordinátát. Elképzeljük például, mi történne, ha kinyújtanánk az egyik rugót, vagy növelnénk a két illesztett rúd közötti szöget, vagy azt a szöget, amelyet a létra a falnak támaszkodva tesz. Megkérdezzük magunktól, hogy mennyi munkát kell elvégeznünk a rendszeren annak érdekében, hogy ezt a koordinátát kis összeggel növeljük. Ha a rendszer egyensúlyból indul, ez a munka nagyon kicsi lesz, és egy végtelenül kicsi elmozdulás határán ez a “virtuális munka” nulla lesz. Ez a módszer nagyon kevéssé különbözik attól, hogy a potenciális energia származékát nullára állítsuk. Itt megemlítem, azonban, mert a koncepció hasznos lehet a fejezetben 13 Hamilton variációs elvének leírásában.
kezdjük egy egyszerű létra probléma elvégzésével a virtuális munka módszerével. A középiskolai fizika szokásos egységes létrája, hossza \ (2L\) és súlya \( mg\), a statikus egyensúly korlátozásában támaszkodik a szokásos sima függőleges falhoz és a durva vízszintes padlóhoz, amelynek a statikus súrlódás korlátozó együtthatója \( \mu\). Mi a szög \(\theta\), hogy a létra teszi a függőleges fal?
ennek számos módja van, amelyek sok olvasó számára ismerősek lesznek. Az egyetlen kis emlékeztető, amit adni fogok, hogy rámutasson arra, hogy ha a létra lábánál lévő két erőt egyetlen, felfelé és kissé balra ható erővé kívánja egyesíteni, úgy, hogy akkor csak három erő hat a létrán, akkor a három erőnek egyetlen ponton keresztül kell működnie, amely a létra közepe felett és a fallal való érintkezési ponttól jobbra lesz. De most érdekli a probléma megoldása a virtuális munka elvével.
mielőtt elkezdeném, figyelmeztetnem kell, hogy a virtuális munka elvének alkalmazásakor fontos, hogy aprólékosan vigyázzunk a jelekre, és ebben a tekintetben emlékeztetem az olvasókat, hogy a differenciálszámításban a \( \delta\) és \( d\) szimbólumok a \( x\) skaláris mennyiség előtt nem jelentenek “kis változást” vagy “végtelen kis változást” az \( x\) – ben. Az ilyen nyelv homályos. A szimbólumok jelentése “kis növekedés” és “végtelen kis növekedés”.
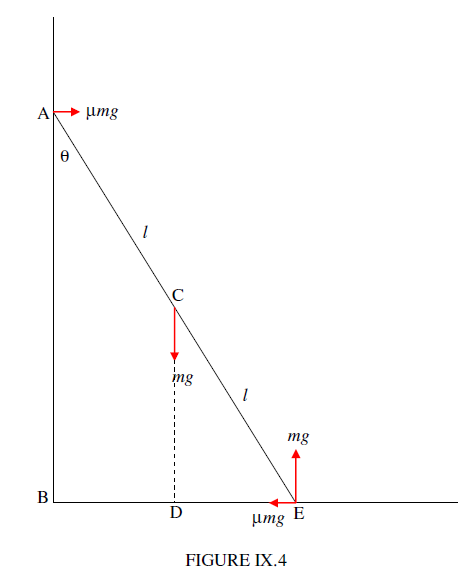
vegye figyelembe a következő távolságokat:
\
és
\
\
és
\
\
Továbbá, ha \(\Theta\) – val növelnénk a \(\Theta\) – t, akkor a C erő által végzett munka \( mg\) – szorosa lenne a CD távolság csökkenésének, az E súrlódási erő által végzett munka pedig mínusz \( \mu mg\) – szorosa lenne a a távolság növelése legyen. A másik két erő nem működik. Így a létrán lévő külső erők által végzett” virtuális munka ”
\
amikor a virtuális munka kifejezését nullára állítjuk, megkapjuk
ellenőrizni kell, hogy ez ugyanaz a válasz, mint amit más módszerekből kapunk – amelyek közül a legegyszerűbb valószínűleg az E-vel kapcsolatos pillanatokat venni.
van valami a virtuális munkában, ami a termodinamikára emlékeztet. A termodinamika első törvénye például \ (\Delta U = \ Delta q+ \ Delta w\), ahol \( \Delta U\) a rendszer belső energiájának növekedése, \ (\Delta q\) A rendszerhez hozzáadott hő, és \( \Delta w\) a rendszeren végzett munka. A prepozíciók fontos szerepet játszanak a termodinamikában. Mindig kötelező egyértelműen és kétértelműség nélkül kijelenteni, hogy a munkát a dugattyú végzi-e a gázon, vagy a gáz a rendszeren; vagy a rendszer hőt nyer, vagy veszít belőle. Ezen elöljárók nélkül minden vita értelmetlen. Hasonlóképpen, ha egy problémát a virtuális munka elvével oldunk meg, mindig elengedhetetlen megmondani, hogy egy erő által a rendszer melyik részén (a létrán vagy a padlón) végzett munkát írja le?), és függetlenül attól, hogy valamilyen hosszúság vagy szög növekedését vagy csökkenését írja le.
térjünk át egy kicsit bonyolultabb problémára, amelyet három különböző módszerrel próbálunk ki – beleértve a virtuális munkát is.
A IX. 5. ábrán egy \( Mg\) tömegű és \( 2a\) hosszúságú, egyenletes AB rúd szabadon csuklós az A-nál. Egy \( l\) hosszúságú könnyű, nyújthatatlan húr egyik vége egy rögzített C ponthoz van rögzítve, ugyanolyan szinten, mint a, és távol van tőle \( 2a\). Áthalad a gyűrűn, és a másik végén egy \( \frac{1}{10}Mg\) súlyt hordoz szabadon. (A “sima” gyűrű azt jelenti, hogy a húr feszültsége megegyezik a gyűrű mindkét oldalán.) Keresse meg a szögfülkét, amikor a rendszer egyensúlyban van.
különböző szögekkel és hosszúságokkal jelöltem, amelyek könnyen meghatározhatók a rendszer geometriájából, és megjelöltem a rúdon lévő négy erőt is.
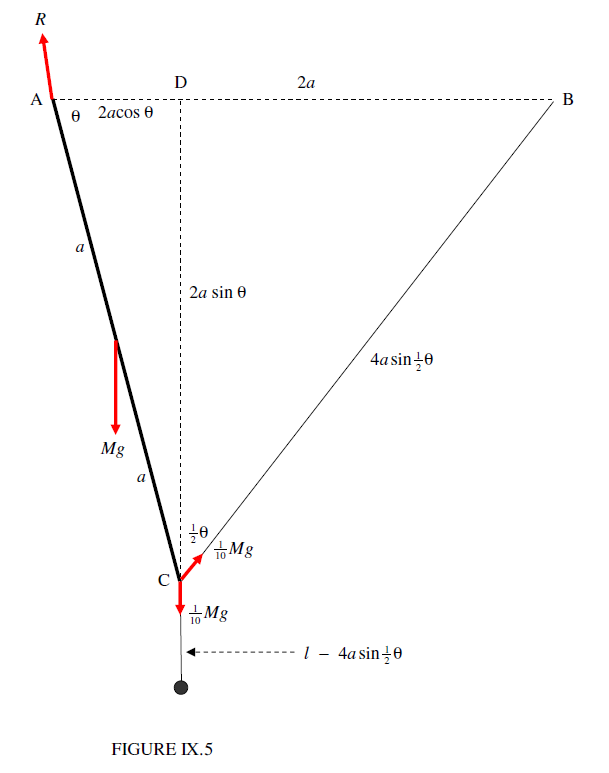
először próbáljunk ki egy nagyon hagyományos módszert. Meglehetősen keveset tudunk a csuklópánt R erejéről a rúdon (bár lásd alább), ezért ez jó ok arra, hogy pillanatokat vegyünk az a ponttal kapcsolatban. Akkor vesszük a potenciális energia nulláját, amikor a rúd vízszintes – ekkor a kis tömeg l távolságban van a szint alatt AC.
\= – \ frac{2}{3}Mga (3\sin\theta-\sin\frac{1}{2}\theta)\]
a derivált
\
most próbáljuk ki virtuális munkával. Növeljük a \( \theta\) – t \( \delta\theta\) – val, és meglátjuk, mennyi munkát végzünk.
így a virtuális munka
\
Ha ezt nullával egyenlővé tesszük, ugyanazt az eredményt kapjuk, mint korábban.
közreműködő
-
Jeremy Tatum (Victoria Egyetem, Kanada)