9.3:Virtual Work
座標に関するポテンシャルエネルギーの導関数がゼロの場合、保守的な力を受ける機械系は平衡にあることがわかりました。 したがって、このような問題を解決する方法は、ポテンシャルエネルギーの式を書き留め、導関数をゼロにすることです。非常によく似た方法は、仮想作業の原則を使用することです。
非常によく似た方法は、仮想作業の原則を使用することです。 この方法では、座標の1つを増加させるような方法でシステムに作用すると想像します。 たとえば、バネの1つを伸ばしたり、2つの接合棒の間の角度を上げたり、はしごが壁に傾いているときに行う角度を増やしたりするとどうなるかを想像してみてください。 私たちは、この座標を少量増やすためにシステム上でどれだけの作業をしなければならないかを自問します。 システムが平衡から始まる場合、この作業は非常に小さくなり、無限に小さな変位の限界では、この”仮想作業”はゼロになります。 この方法は、ポテンシャルエネルギーの導関数をゼロに設定することとはほとんど異なりません。 しかし、この概念はハミルトンの変分原理を記述する第13章で有用であるかもしれないので、ここで言及します。
仮想作業の方法で簡単なラダー問題を行うことから始めましょう。 長さ\(2l\)と重量\(mg\)の高校物理学の通常の均一なはしごは、静的摩擦を制限する係数が\(\mu\)である通常の滑らかな垂直壁と粗い水平床に対して静的平衡を制限 はしごが垂直壁で作る角度\(\theta\)は何ですか?これを行うにはいくつかの方法がありますが、多くの読者にはよく知られています。
これを行うにはいくつかの方法があります。 私が与える唯一の小さなリマインダーは、あなたがはしごのふもとにある二つの力を上向きに、やや左に作用する単一の力に結合したい場合は、はしごに作用するだけで三つの力があるように、三つの力は、はしごの中央の上にあり、壁との接触点の右側にある単一の点を通って行動しなければならないことを指摘することです。 しかし、私たちは今、仮想作業の原則によってこの問題を解決することに興味を持っています。その点で、微分計算において、スカラー量\(x\)の前にある記号\(\delta\)と\(d\)は、\(x\)の”小さな変化”や”無限小の変化”を意味するものではないことを読者に思い出させます。 そのような言語は漠然としています。 記号は”a small increase in”と”an infinitesimal increase in”の略です。p>
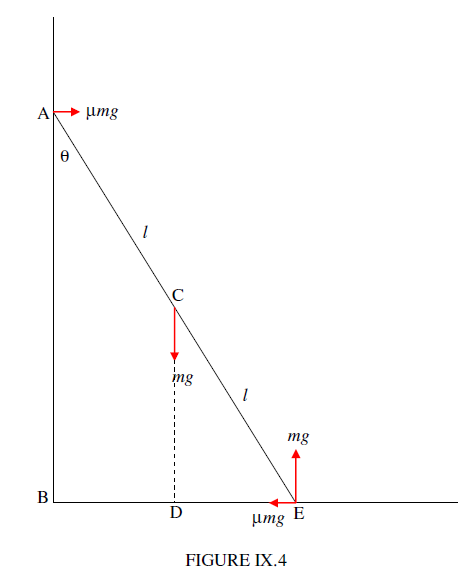
私たちは、次の距離に注意してみましょう:さらに、\(\theta\)を\(\delta\theta\)だけ増加させると、Cでの力によって行われる作業は\(mg\)に距離CDの減少の倍になり、Eでの摩擦力によって行われる作業は\(\mu mg\)に距離CDの増加の倍になります。距離があります。 他の二つの力は何の仕事もしません。 したがって、はしご上の外力によって行われる”仮想作業”は、
\
仮想作業の式をゼロにすると、
\
これが他の方法から得られるのと同じ答えであることを確認する必要があります。
熱力学を思い出させる仮想作業についての何かがあります。 例えば、熱力学の第一法則は\(\Delta U=\Delta q+\Delta w\)であり、ここで\(\Delta U\)はシステムの内部エネルギーの増加であり、\(\Delta q\)はシステムに加えられる熱であり、\(\Delta w\)はシ 前置詞は熱力学において重要な役割を果たす。 仕事がガスのピストンによって、またはシステムのガスによって行われるかどうかはっきりそして曖昧さなしで示すことは必須常にです;または熱 これらの前置詞がなければ、すべての議論は無意味です。 同様に、仮想作業の原則によって問題を解決するには、システムのどの部分(はしごや床の上)に力によって行われた作業を記述しているかどうかを言)そして、あなたはいくつかの長さや角度の増加または減少を記述しているかどうか。
私たちは少し難しい問題に移動してみましょう、我々は三つの異なる方法によって試してみましょう–仮想作業のそれを含みます。
図IX.5では、重量\(Mg\)と長さ\(2a\)の均一なロッドABは、aで自由にヒンジされています。 長さ\(l\)の軽い非保持性の文字列は、一方の端がAと同じレベルの固定点Cに接続され、そこから離れている\(2a\)を持ちます。 それはリングを通過し、そのもう一方の端に自由にぶら下がっている重量\(\frac{1}{10}Mg\)を運びます。 (”滑らかな”リングは、文字列の張力がリングの両側で同じであることを意味します。)システムが平衡状態にあるときの角度CABを求めます。私は簡単にシステムの形状から決定することができる様々な角度と長さでマークしている、と私はまた、ロッド上の四つの力をマークしています。
私はp>
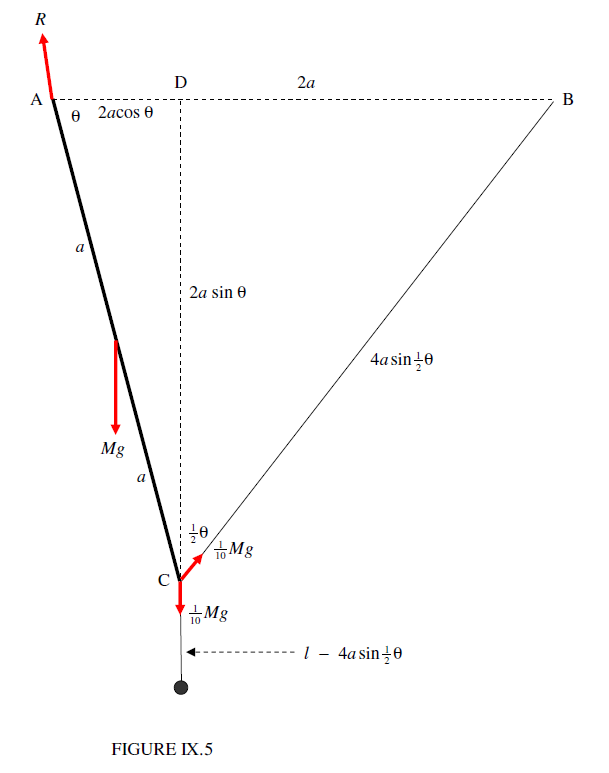
まず、非常に従来の方法を試してみましょう。 私たちはロッド上のヒンジの力Rについてはほとんど知っていません(下記参照)ので、これはポイントAについての瞬間を取るための良い理由です。
\
今、エネルギー条件を使用して同じ問題を試してみましょう。 棒が水平であるとき、私たちはポテンシャルエネルギーのゼロを取るでしょう–その時、小さな質量はレベルACより下の距離lにあります。これは、次のようになります。
\=-\frac{2}{3}Mga(3\sin\theta-\sin\frac{1}{2}\theta)\]
導関数は次のとおりです。
\
仮想作業で試してみましょう。 \(\Theta\)を\(\delta\theta\)ずつ増やして、どれだけの作業が行われているかを見ていきます。
したがって、仮想作業は
\
これをゼロにすると、前と同じ結果が得られます。
投稿者
-
ジェレミー-テイタム(ビクトリア大学、カナダ)
投稿者
-
ジェレミー-テイタム(カナダ)