9.3: praca wirtualna
widzieliśmy, że układ mechaniczny podlegający działaniu sił zachowawczych jest w równowadze, gdy pochodne energii potencjalnej względem współrzędnych wynoszą zero. Metodą rozwiązywania takich problemów jest więc zapisanie wyrażenia dla energii potencjalnej i postawienie pochodnych na zero.
bardzo podobną metodą jest stosowanie zasady pracy wirtualnej. W tej metodzie wyobrażamy sobie, że działamy na układ w taki sposób, aby zwiększyć jedną ze współrzędnych. Wyobrażamy sobie na przykład, co by się stało, gdybyśmy rozciągnęli jedną ze sprężyn, albo zwiększyli kąt między dwoma łączonymi prętami, albo kąt, jaki drabina robi, gdy opiera się o ścianę. Zadajemy sobie pytanie, ile pracy musimy zrobić w systemie, aby zwiększyć tę współrzędną o niewielką kwotę. Jeśli układ zaczyna się od równowagi, praca ta będzie bardzo mała, a w granicy nieskończenie małego przemieszczenia, ta „praca wirtualna” będzie zerowa. Metoda ta niewiele różni się od ustawienia pochodnej energii potencjalnej na zero. Wspominam o tym tutaj, ponieważ pojęcie to może być przydatne w rozdziale 13 w opisie Zasady wariacyjnej Hamiltona.
zacznijmy od zrobienia prostego problemu drabiny metodą wirtualnej pracy. Zwykła jednolita drabina fizyki szkoły średniej, o długości \ (2L\) i wadze \( mg\), opiera się w ograniczaniu równowagi statycznej na zwykłej gładkiej ścianie pionowej i szorstkiej podłodze poziomej, której współczynnik ograniczania tarcia statycznego wynosi \( \mu\). Jaki jest kąt \(\theta\), jaki drabina robi z pionową ścianą?
istnieje kilka sposobów, które będą znane wielu czytelnikom. Jedyne małe przypomnienie, które dam, to zwrócenie uwagi na to, że jeśli chcesz połączyć dwie siły u stóp drabiny w jedną siłę działającą w górę i nieco w lewo, tak aby były tylko trzy siły działające na drabinę, trzy siły muszą działać przez pojedynczy punkt, który będzie powyżej środka drabiny i na prawo od punktu styku ze ścianą. Ale teraz jesteśmy zainteresowani rozwiązaniem tego problemu na zasadzie wirtualnej pracy.
przed rozpoczęciem powinienem ostrzec, że w stosowaniu zasady pracy wirtualnej ważne jest, aby być skrupulatnie ostrożnym w stosunku do znaków, i w tym względzie przypominam czytelnikom, że w rachunku różniczkowym symbole \( \delta\) i \( d\) przed wielkością skalarną \( x\) nie oznaczają „małej zmiany” lub „infinitezymalnej zmiany” w \( x\). Taki język jest niejasny. Symbole oznaczają „mały wzrost” i „nieskończenie mały wzrost”.
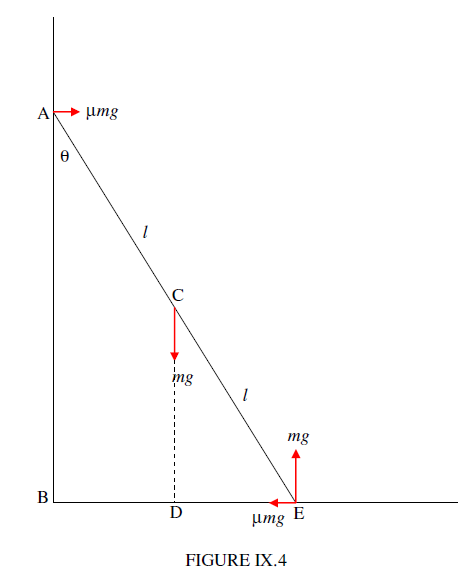
zwróćmy uwagę na następujące odległości:
\
i
\
\
I
I
I
Dalej, gdyby zwiększyć\(\theta\) o\ (\delta \theta\), praca wykonywana przez siłę w C byłaby\ (mg\) razy mniejsza odległość CD, a praca wykonywana przez siłę tarcia w E byłaby minus\ (\mu mg\) razy większa z odległości być. Pozostałe dwie siły nie działają. Tak więc „wirtualna praca” wykonywana przez siły zewnętrzne na drabinie to
\
Po ustawieniu wyrażenia dla wirtualnej pracy na zero, otrzymujemy
\
należy zweryfikować, że jest to ta sama odpowiedź, co otrzymujemy z innych metod – z których najłatwiej jest chyba zająć chwilę o E.
jest coś w wirtualnej pracy, co przypomina mi termodynamikę. Pierwsze prawo termodynamiki, na przykład, to \ (\Delta U= \ Delta q+ \ Delta W\), gdzie \( \Delta U\) to wzrost wewnętrznej energii układu, \ (\Delta q\) to ciepło dodawane do układu, a \( \Delta w\) to praca nad układem. Przyimki odgrywają ważną rolę w termodynamice. Zawsze jest obowiązkowe, aby jasno i bez dwuznaczności stwierdzić, czy praca jest wykonywana przez tłok na gazie, lub przez gaz na systemie; lub czy ciepło jest pozyskiwane przez system lub utracone z niego. Bez tych przyimków cała dyskusja jest bezsensowna. Podobnie w rozwiązywaniu problemu na zasadzie pracy wirtualnej zawsze ważne jest, aby powiedzieć, czy opisujesz pracę wykonaną siłą na jakiej części systemu (na drabinie czy na podłodze?) i czy opisujesz wzrost czy spadek o jakiejś długości czy kąta.
przejdźmy teraz do nieco trudniejszego problemu, który spróbujemy trzema różnymi metodami – w tym pracą wirtualną.
na fig.IX.5 jednolity pręt AB o masie \( Mg\) i długości \( 2a\) jest swobodnie zawiasowany na A. koniec B nosi gładki pierścień o znikomej masie. Lekki ciąg nierozciągliwy o długości \ (l\) ma jeden koniec przymocowany do stałego punktu C na tym samym poziomie co a i odległy \( 2A\) od niego. Przechodzi przez pierścień i nosi na drugim końcu wiszący swobodnie ciężar \( \frac{1}{10}Mg\). (Pierścień „gładki” oznacza, że napięcie w sznurku jest takie samo po obu stronach pierścienia.) Znajdź kabinę kątową, gdy system jest w równowadze.
zaznaczyłem w różnych kątach i długościach, które można łatwo określić z geometrii układu, a także zaznaczyłem cztery siły na drążku.
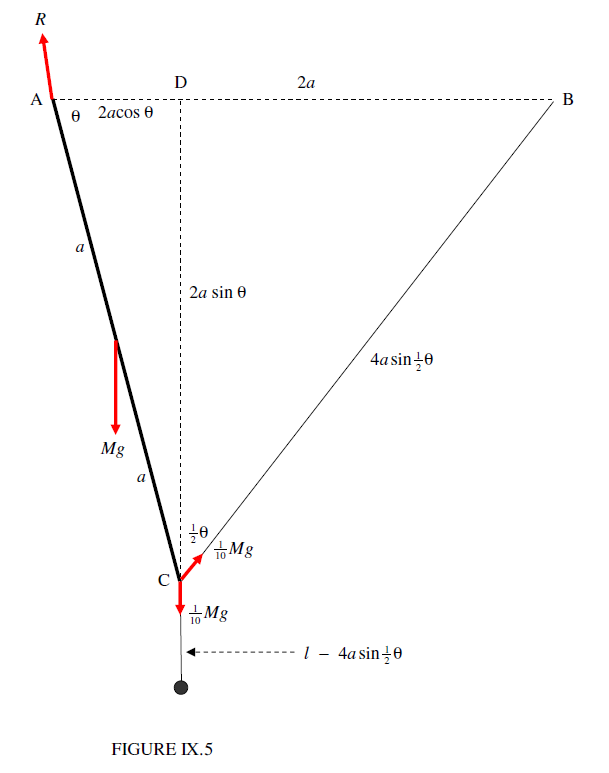
spróbujmy najpierw bardzo konwencjonalnej metody. Niewiele wiemy o sile R zawiasu na pręcie (choć patrz poniżej), dlatego jest to dobry powód do brania chwil na temat punktu A. natychmiast uzyskujemy
\
teraz spróbujmy tego samego problemu przy użyciu warunków energetycznych. Bierzemy zero energii potencjalnej, gdy pręt jest poziomy – w tym czasie mała masa znajduje się w odległości l poniżej poziomu AC.
\=-\frac{2}{3}Mga(3\sin\theta-\sin\frac{1}{2}\theta)\]
pochodna to
\
teraz spróbujmy wirtualnie. Zamierzamy zwiększyć \ (\theta\) przez \ (\delta \ theta\) i zobaczyć, ile pracy zostało zrobione.
tak więc praca wirtualna to
\
Jeśli ustawimy to na zero, otrzymamy taki sam wynik jak poprzednio.
Współpracownik
-
Jeremy Tatum (University of Victoria, Canada)